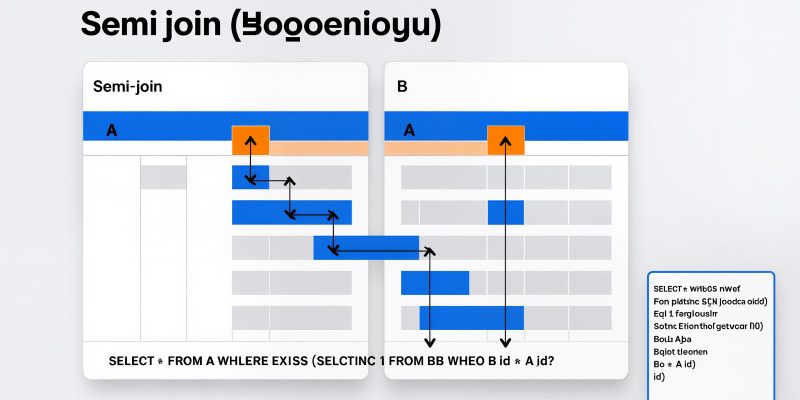
Semi-join (полусоединение) — операция в SQL
Semi-join (полусоединение) — операция в SQL, которая возвращает строки только одной из соединяемых таблиц, без выполнения соединения полностью. В отличие от обычных соединений, которые включают строки из обеих таблиц, semi-join возвращает только столбцы из левой таблицы.
Существуют левые и правые полусоединения Semi-join:
Левое полусоединение — возвращает строки левой (первой) таблицы, которые соответствуют строкам из правой (второй) таблицы. Правое полусоединение — возвращает строки из правой таблицы, которые соответствуют строкам из левой таблицы. Синтаксис в SQL нет явного синтаксиса для операции semi-join.
Однако есть два варианта альтернативного синтаксиса:
1/ На основе EXISTS:
SELECT * FROM table1 WHERE EXISTS (SELECT 1 FROM table2 WHERE table1.column = table2.column).
2/ На основе IN:
SELECT * FROM table1 WHERE column IN (SELECT column FROM table2).
Пример Semi-join
Запрос с полусоединением на основе EXISTS:
SELECT * FROM table1 t1 WHERE EXISTS (SELECT 1 FROM table2 t2 WHERE t1.column1 = t2.column2).
Результат: все строки из таблицы table 1, для которых существует соответствующая строка в таблице table 2.
Реализация Semi-join
В большинстве современных СУБД операция semi-join реализуется с помощью предикатов IN, ANY, SOME, EXISTS и DISTINCT. Например: Oracle называет эту операцию «HASH JOIN (SEMI)» («SEMI» присутствует в названии). PostgreSQL — semi-join можно реализовать с помощью подзапроса с оператором EXISTS или с помощью ключевого слова IN.
Операционная система реального времени (ОСРВ, RTOS) — тип специализированной операционной системы, основное назначение которой — предоставление набора функций для проектирования, разработки и функционирования систем реального времени на конкретном аппаратном оборудовании.
Главное отличие таких систем от всех остальных — в скорости обработки внешних сигналов и своевременном реагировании. В RTOS время реагирования и обработки сигнала должно быть таким, чтобы гарантированно успеть сделать всё, что нужно в данный момент.
Операционные системы реального времени делят на два типа:
Системы жёсткого реального времени. Не допускают задержек реакции системы, так как это может привести к потере актуальности результатов, большим финансовым потерям или даже авариям и катастрофам.
Системы мягкого реального времени. Задержка реакции считается восстановимой ошибкой, которая может привести к увеличению стоимости результатов и снижению производительности, но не является фатальной.
Некоторые области применения RTOS: аэрокосмические и оборонные системы, автомобильные системы, промышленная автоматизация, медицинское оборудование, робототехника и телекоммуникации.
Популярные операционные системы реального времени: FreeRTOS, VxWorks, QNX, eCos и RT-Linux.