Лучший в мире робот для настольного тенниса
Итак робот для настольного тенниса. Привет, ребята,
Сегодня я познакомился со своим первым в истории нечеловеческим игроком в настольный теннис из Omron, в выставочном центре Messe в Ганновере, Германия.
Эта машина абсолютно невероятна и имеет встроенные функции, такие как искусственный интеллект и способность учиться у противника!
Что я нашел сногсшибательным, так это то, как хорошо он справлялся с моими ударами и подачами спинни!
Я использовал универсальную биту с резиной Sriver, поэтому мне удалось создать много вращений.
Робот для настольного тенниса: Прогнозирование траектории входящего мяча
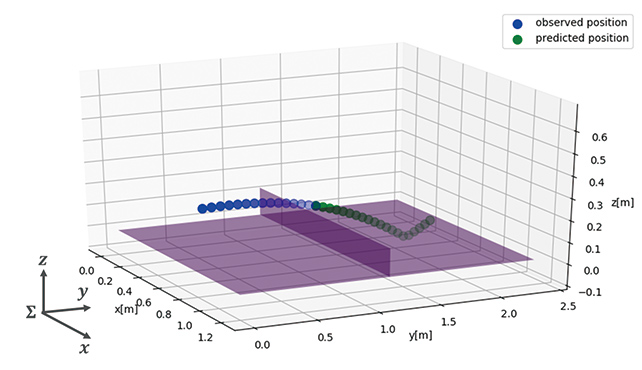
На рис. 2 показано концептуальное изображение прогноза траектории набегающего мяча.
Это прогнозирование траектории выполняется для прогнозирования траектории мяча, ведущей к точке, близкой к точке удара робота, на основе положения мяча, наблюдаемого во времяпосле отскока.
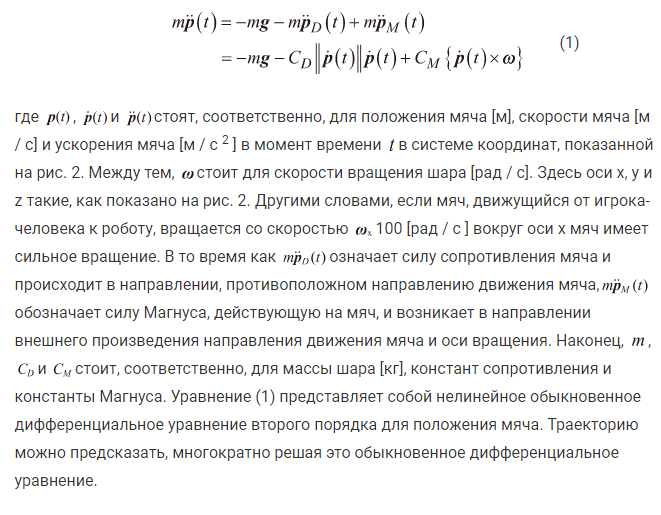
Известно, что в целом мяч демонстрирует не простое параболическое движение, а нелинейное движение из-за аэродинамических характеристик, таких как сила сопротивления, связанная со скоростью мяча, или сила Магнуса, связанная со скоростью вращения.
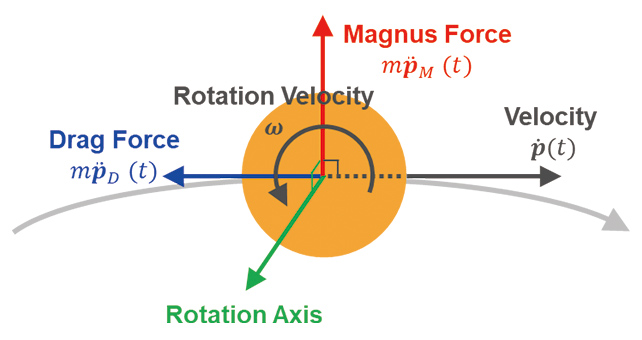
На рис. 3 показана аэродинамическая сила, действующая на мяч.
В этот момент мяч ведет себя в соответствии с динамической моделью, выраженной уравнением (1):
Робот для настольного тенниса: Предсказание траектории исходящего мяча
При прогнозировании траектории исходящего мяча от робота для пинг-понга траектория мяча рассчитывается назад от его целевого положения, чтобы определить его скорость сразу после ответного выстрела.
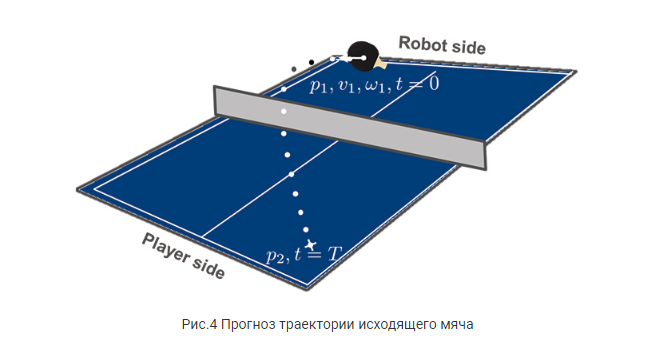
На рис. 4 показано концептуальное изображение прогноза траектории исходящего мяча.
Положение точки попадания в момент ответного выстрела,целевое положение для исходящих шаров,и скорость вращения сразу после ответного выстрела,задаются в качестве условий граничных значений для определения скорости исходящего шара.
В этой статье, однако, предполагается, что скорость вращения выходящего шара остается неизменной.
Предположим здесь, что время, необходимое исходящему мячу для достижения целевой позиции, равноТ.
Планирование движения ракетки
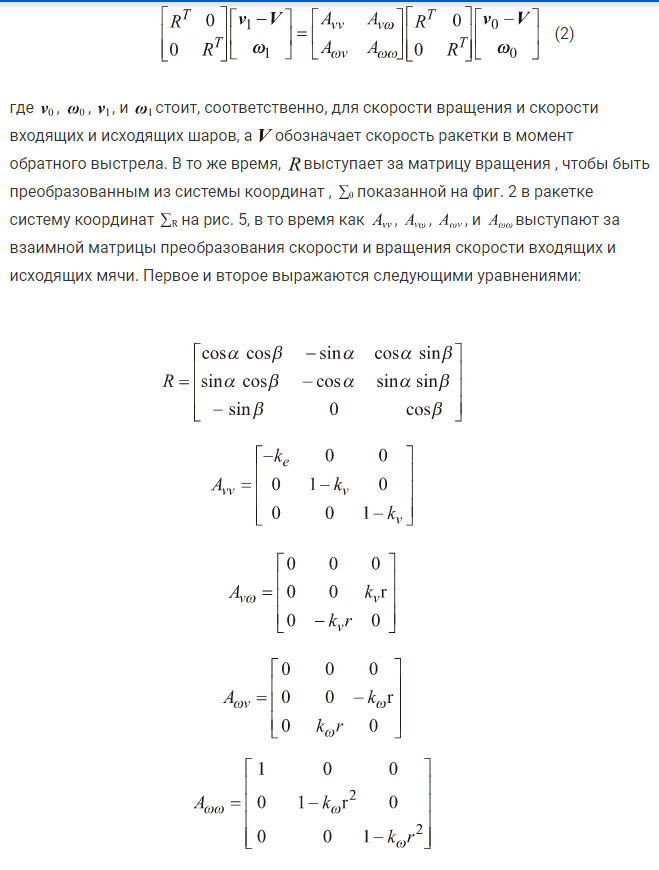
На рис. 5 показано концептуальное изображение планирования движения ракетки для ответных ударов. При планировании движения ракетки для ответных ударов определяется скорость ракетки[м / с] и положение ракетки,в момент ответного выстрела, чтобы позволить роботу выполнить ответный выстрел со скоростью мяча, определенной на основе прогноз траектории исходящего мяча.
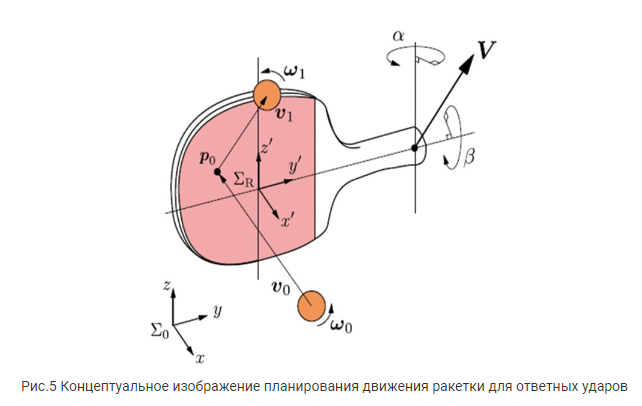
Формулировка для ответного удара ракеткой может быть дана моделью удара ракетки по мячу, выраженной в уравнении (2):
Выводы
Система робота, которую мы здесь предложили, может выполнять ответные удары с учетом скорости вращения мяча и, следовательно, демонстрирует повышенную точность ответного выстрела относительно целевой позиции для исходящих мячей.
Тем не менее, предлагаемая система все еще не свободна от ошибок относительно целевой позиции для исходящих шаров.
Факторы, которые считаются ответственными за это, перечислены ниже.
Эти проблемы должны быть решены для того, чтобы эта система могла выдерживать соревнования по развитию навыков с игроками в настольный теннис среднего уровня (средний уровень игроков).
- (i) точность измерения положения мяча;
- (ii) точность модели удара ракетки; а также
- (iii) Характеристики управления движением робота.
Задача (i) требует дальнейшего повышения точности измерений. Это возникло из-за того, что на точность оценки скорости вращения на основе уравнения (7) влияют ошибки измерения положения мяча.
Что касается Challenge (ii), в этой статье используется линейная модель, заданная уравнением (2), для представления столкновения между мячом и ракеткой.
В действительности же ракетка облицована резиной. Следовательно, столкновение между мячом и ракеткой происходит как нелинейное явление.
В результате линейная модель допускает погрешности в скорости мяча в момент ответного выстрела относительно целевого значения.
Наконец, вызов (iii) относится к ограничениям ограниченного диапазона движения или ускорения робота.
Из-за этих ограничений целевая скорость ракетки не может быть достигнута.
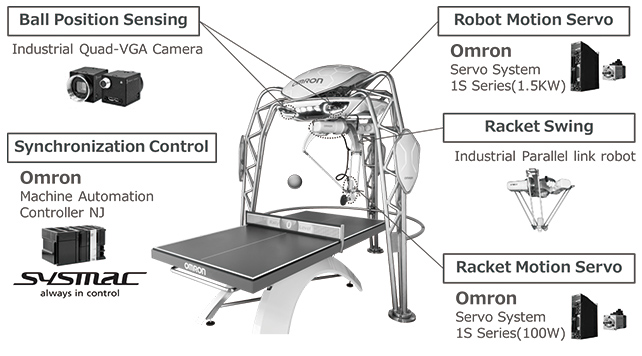
В этой статье мы предложили систему робота для пинг-понга, которая была реализована комбинацией следующих трех методов:
- метод оценки скорости вращения с использованием промышленных камер со скоростью 80 кадров в секунду, что послужило основой для следующих двух методов;
- метод прогнозирования траектории входящего и исходящего мяча;
- и способ планирования движения ракетки, позволяющий роботу наносить ответные удары в заданное положение с более высокой точностью.
Пожелаем ребятам удачи. Статья полная здесь.